四輛機器人迷你車、一座穿梭複雜的隧道路線、一項時間緊迫的賽事,這是一位麻省理工學院教授為史上最酷的課程所打造出的期末考題目。
儘管這個「Rapid Autonomous Complex-Environment Competing Ackermann-steering Robot 」(快速自動駕駛車複雜環境對抗阿克曼轉向機器人,縮寫為‘賽車’RACECAR)課程有著冗長名稱,依舊引發學生們的好奇心。
學生們的挑戰:打造一輛自動駕駛迷你機器人車輛,能自行導航沿著隧道迷宮的曲折軌道迂迴前行。

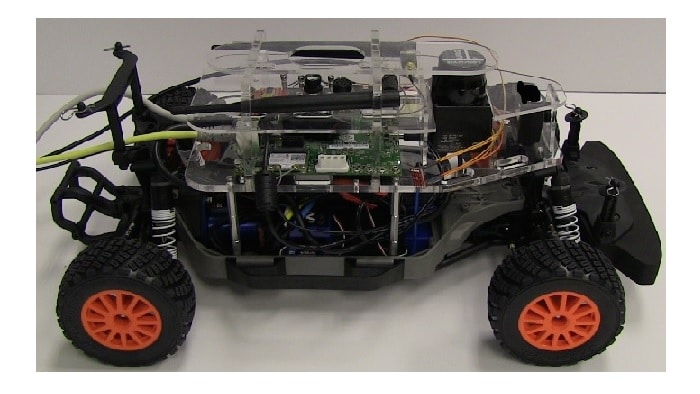
高速賽車手:麻省理工學院的 Sertac Karaman
和他使用 NVIDIA Jetson TK1
開發套件設計出的機器人迷你車。
學生們使用 Jetson TK1 嵌入式電腦來設計程式演算法,賦予車輛自動駕駛的能力。Jetson TK1 協助 1:10 比例的車輛部署開放源碼機器人作業系統(ROS: Robot Operating System)、評估環境,以及開發出一套語言,讓高速行駛的車輛能沿著軌道前行。
這項課程成為校園裡的熱門課程。開辦這項課程的麻省理工學院航空太空工程學系助理教授 Sertac Karaman 明年將以 Jetson 套件為重心,設計規模更龐大的內容。
原生能力
RACECAR 的學生集合他們的長才,以五人一組共同合作。有些人擅長軟體,有些人組造機器人,而有些人則操作機器人作業系統,對所有人來說這些都是全新體驗。
Karaman 去年一月在規劃推出 RACECAR 課程時,心裡有個願望。
他說:「我們需要原生的運算能力、攝影機和感測器,快速處理投入的大量數據,還要強大的工具。」
他在試用過 Jetson 後訂了十套,用在六輛車上 – 四輛學生的車、一輛備用,一輛則是他跟同事的車。
Karaman 在拿到麻省理工學院航空太空工程學系博士學位後留在學校,這裡有著各式各樣的機器人,同時學習用於飛機和無人機安全至上的嵌入式電腦系統。他在研究自駕車及其它車輛後,準備好要將機器人加入他的陣容。
Karaman 跟麻省理工學院林肯實驗室海狸工程中心裡合作的同事 Michael Boulet、Owen Guldner 及 Michael Park 為了 RACECAR 課程,開設七堂課介紹機器人作業系統及機器人演算系統運作方式,搭配讓學生們透過實驗課程學習設計「受驚車輛」的程式,有人走向它時車輛會後退。
各隊在為期三天的駭客松課程裡,全力以赴利用軟體作業系統讓車輛在不撞到東西的情況下,順利通過隧道。
機器人賽車
在完成類似暖身的課程後,隊伍間正式開始較勁。時速低於八哩(不過它們能輕鬆突破兩倍以上的速限)的機器人賽車,以一對一的方式在500呎以上的隧道軌道上比拼。
Karaman 說:「第一輛車花了一分半的時間,隊伍拉高速度,後來只花了49秒就跑完,相當於平均時速為七哩的速度。車子展現出高速過彎的技巧,速度最快的那隊贏得冠軍時,其他隊伍也齊聲歡呼。」
Karaman 針對明年的課程已經有遠大的規劃,打造一級方程式賽車風格的場地,讓十幾輛車爭奪跑道內圈的有利地置。他在見識過 Jetson 的能耐後,打算加入採用 GPU 技術的立體環繞攝影機和特徵偵測技術。
他說:「很驚訝學生這麼快就學會使用 Jetson,安裝好就能上手。我們打算把 Jetson 裝在無人機上,讓它飛來飛去。只有筆電是做不到那一點的。」