
自動駕駛車模擬平台整合了多種複雜的資料集,以便在虛擬環境內進行測試和驗證。
自動駕駛技術不光是要取代人類駕駛員,而是要創造比人類駕駛更安全的人工智慧駕駛員。
美國智庫 RAND Corporation 指出,要讓自動駕駛技術較人類駕駛員的開車水準高出 20%,需要行駛110億英里進行驗證,也就是說要在現實環境裡讓100輛車不間斷地行駛500年以上的時間。這是一項不可能的任務。
模擬成為一項打破這項障礙的強大工具,開發人員利用虛擬環境來安全準確地測試和驗證自動駕駛技術相關的軟硬體。
「模擬環境不斷整合各項資料,讓我們的工程師獲得巨大的生產力。人工智慧系統的模擬活動是成功與否的關鍵因素。」NVIDIA 創辦人暨執行長黃仁勳在 GTC Japan 大會上如此表示。
不過要將模擬有效用於開發安全的自動駕駛技術,它必須完全呈現出現實環境裡的多樣性和不可預測性。
這正是 NVIDIA 今天宣布將開放 DRIVE Constellation 模擬平台的原因,跟合作夥伴攜手整合他們的環境模型、車輛模型和交通情境。
有各式夥伴加入 DRIVE Constellation 平台,將使得這個平台廣納百川,具備多元複雜的測試元素。
有效進行模擬的重要因素
模擬出的測試環境不僅是一輛虛擬汽車行駛在虛擬道路上,在打造模型內的物體時得跟電影場景裡的畫面同樣密集,還要跟車輛最終要行駛於上的城市道路和高速公路建設藍圖一樣詳細精準。
虛擬環境不單要看起來栩栩如生,也必須遵守物理定律。DRIVE Sim 就是設計為用以測試任何潛在環境和行車情況,以消化各種世界、車輛及交通情境模型所產出的龐大資料量。
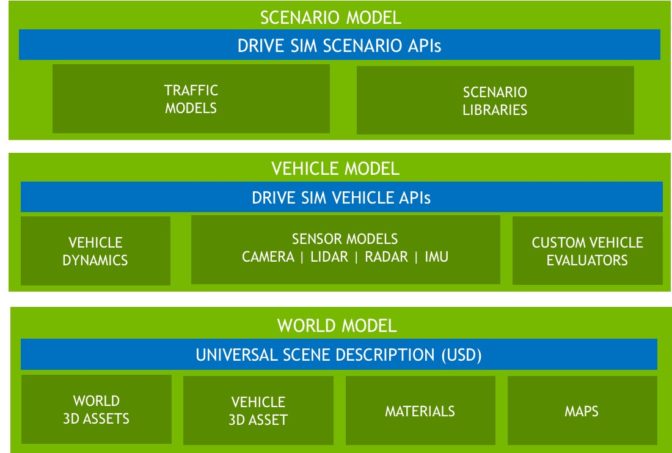
- 世界模擬模型:
羅馬不是一天建成的,虛擬城市也是如此。舉例來說,開發人員如果想要模擬舊金山的測試環境,就必須從地圖開始著手,接著在地圖上覆蓋建築物、樹木和其它地標;還必須呈現出城市裡的每一寸土地,打造出一個跟現實世界毫無分差的測試環境。這個虛擬世界同樣必須模擬從光線到天氣的現實條件。在未離開模擬平台的情況下,車輛可以從加州山景城陽光明媚的清晨,一路開車穿越舊金山伸手不見五指的濃霧。
- 感應器和車輛模擬模型:
自動駕駛車與人類不同之處,在於它不單靠著視覺資料來察看車身四周的環境。雷達和光達感應器搭配攝影機感應器,將各種資料餵給車輛以做出決定。綜合模擬平台應該要仿效饋送資料的情況,測試演算法怎麼對各種感應器輸入的資料做出反應。
模擬環境裡的虛擬汽車,也必須跟在實際環境裡的真實車輛做出一模一樣的動作和車輛力學,像是煞車、加速進入高速公路,或是在顛簸的道路上行駛。
- 交通與情境模型:
開發人員必須先觀察和重建現實環境裡的各項例子,接著在模擬器裡改變天氣、光線和道路狀況,以建立各種情境,才能創造出逼真的虛驚事件。必須具備各種變化情況,才能全面對自動駕駛技術的軟硬體進行驗證。
這些情境也要符合各測試環境的交通禮節,像是模擬匹茲堡的行車環境時,必須考慮到「匹茲堡式左轉」的情況,也就是四向十字路口的左轉車輛先行,再讓對向直行車輛通行。
龐大的合作夥伴網路
NVIDIA 開放 DRIVE Sim 給合作夥伴使用,擴大了平台的深度和靈活性。納入各種世界、車輛和交通模型提高了測試和驗證自動駕駛車的效果。
從製作世界模型、車輛和感應器模型,再到交通及情境模型的專門業者,這些開發模擬技術的公司早就跟 NVIDIA 合作發展 DRIVE Constellation 平台。
![]() NVIDIA 與眾多模擬技術合作夥伴共同發展 DRIVE Constellation 平台。
NVIDIA 與眾多模擬技術合作夥伴共同發展 DRIVE Constellation 平台。
深入瞭解自動駕駛車測試與驗證開放 DRIVE Constellation 平台。