
在你準備接受手術之際,希望是由技術高超、經驗豐厚又雙手穩定的醫師來執行,或者是由一具有著這些條件的機器人來操刀。
位於美國華府國家兒童醫學中心(CNMC)的研究團隊正在讓機器人外科醫生自主進行軟組織手術一事,以推動這個目標。
一隻指引的「手」
早在1980年代中期便出機器人輔助手術,一支來自加拿大英屬哥倫比亞大學的研究團隊使用機器人來輔助進行一項整形手術。
三十年過去,我們在没有外科醫生實際在場的情況下,由機器人負責進行更複雜手術的目標,還有一條很漫長的路要走。不過近期在 GPU 的輔助下進行手術,可使得手術更安全、讓更多病患接受手術,同時也降低了手術費用。
CNMC 副主任醫師,也是專案主研究員的 Peter Kim 說:「目標不是要捨棄外科醫師,而是提供一個聰明的選項或解決方案,以提高他們的生產力和能力。」
就算是目前使用機器人來執行相對例行性的自主「軟性手術」程序,外科醫師還是會指導著機器人執行每個動作,代表在外科醫師操控時機器人仍有著相當的限制。Kim 的團隊則是投入更多心力,開發出一具能在軟組織上自主執行更精密手術程序的機器人。
可執行程序精密程度達釐米以下的外科手術機器人
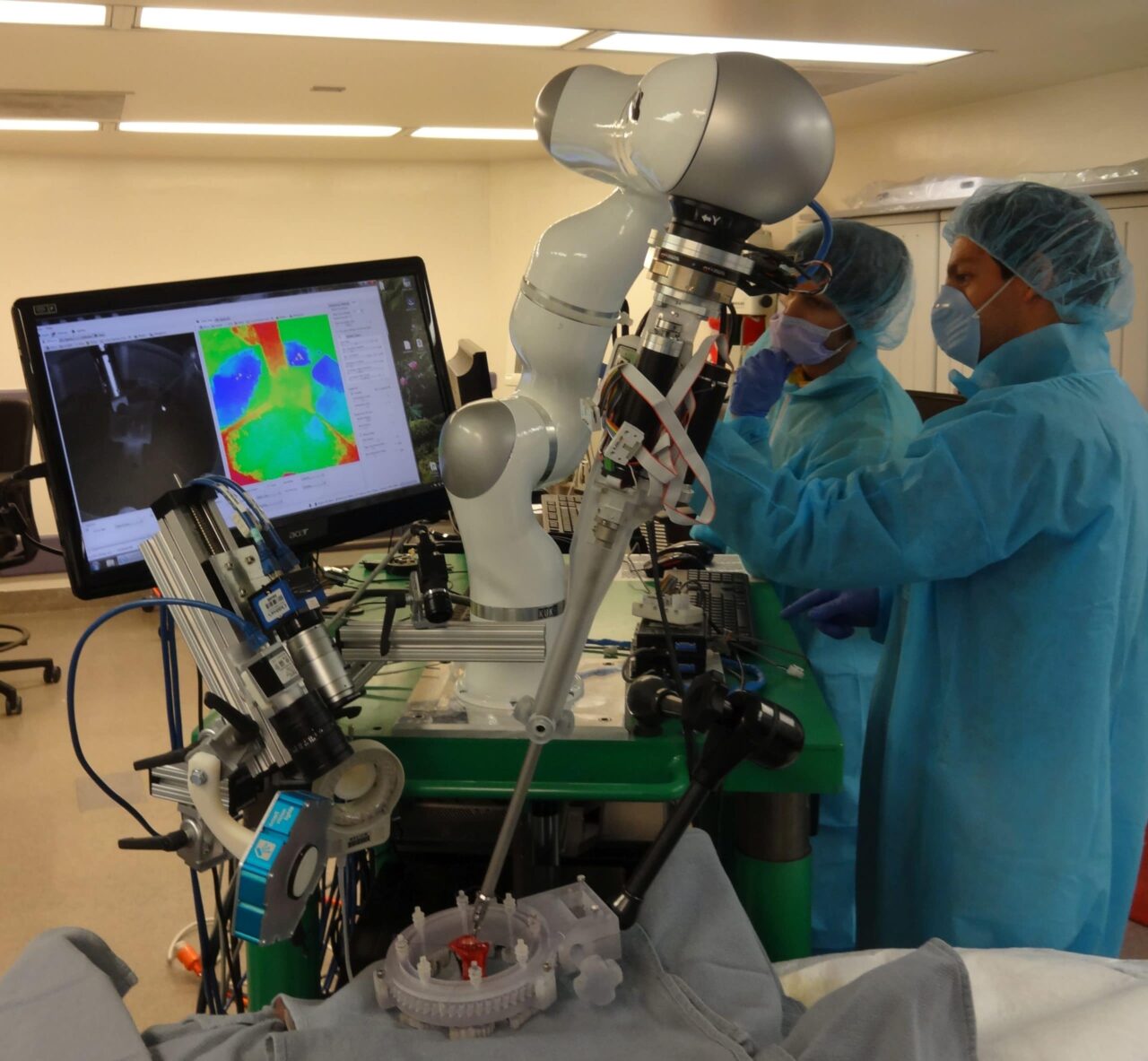
Kim 及其研究團隊投入 NVIDIA 的 GeForce GTX TITAN GPU 等創新技術,開發出 Smart Tissue Autonomous Robot(智慧組織手術自主機器人,簡稱為 STAR)。STAR 的外型猶如人類手臂,使用 3D 光場攝影機和近紅外線視覺能力,找出軟組織上極為細微的地方,以達釐米以下的精密程度進行手術。
研究團隊也使用腹腔鏡縫合工具加入感應能力,讓 STAR 在接觸到軟組織時能「感覺」到緊張和壓力;並且團隊運用外科醫師執行複雜手術的知識和經驗來設計機器人的程式。
他們日前在《科學轉譯醫學》(Science Translational Medicine)期刊上發表研究成果。
本身也是喬治華盛頓大學醫學院教授的 Kim 選擇在豬隻身上接合(縫合兩段管狀結構)腸子,以測試 STAR 的能力。
研究團隊選擇接合手術,原因在於這是一項全美一年要執行百萬次,相當常見又複雜的手術,而且從未在無人類直接控制的情況下,單獨由機器操刀。它就像是修理澆花水管,目標是緊密正常排列腸子,不會發生外漏的情況。
突破性的 STAR
STAR 並未順利完成首項全自主機器人接合手術,不過它的縫合間隔相當一致,使得比起經驗豐富的外科醫生,有人監督的 STAR 自主機器人手術所實施的手術出現更好的結果。
「冷靜來看,它不用很高的智慧就能完成。」Kim 說。
GPUs 是 STAR 自主機器人的核心,加快計算光場攝影機資料的速度,而這些攝影機用於捕捉場景散發出的光線資訊,讓 STAR 能即時認知到位置和追蹤目標組織。
Kim 相信將更多感應、視覺和感知資料投入 STAR,以及運用平行處理等高超運算技術,STAR 最終會發展成為具備充足知覺能力和智慧,能隨時隨地執行各類手術的機器人外科醫師。
Kim 說「它就像是自動駕駛車,我們從巡航操控、自主停車、車道警告、自主煞車開始,到最終的自動駕駛。目標是解救生命和預防意外。包括自主手術在內研究智慧手術技術的目的,跟自動駕駛技術並無不同。」
照片由國家兒童醫學中心謝赫札耶德研究所提供。