人型機器人的市場規模在未來二十年內,有望達到 380 億美元之譜。為滿足如此龐大的需求,尤其是來自工業和製造業的需求,NVIDIA 發表了一系列機器人基礎模型、資料管道和模擬框架,以加速開發下一代人型機器人。
NVIDIA 創辦人暨執行長黃仁勳今日在 CES 大會宣布,用於產生合成動作的 NVIDIA Isaac GR00T 藍圖(blueprint)可以協助開發人員產生出極為大量的合成動作資料,以利用模仿學習的方式訓練人型機器人。
模仿學習是機器人學習裡的一個子集合,可以讓人型機器人用觀察和模仿專家真人示範的方式來學習新技能。想要收集這些廣泛又高品質的現實世界資料集,非常無聊且要花費許多時間,成本往往更高得令人卻步。使用適用於產生合成動作的 Isaac GR00T 藍圖,開發人員只要少數的真人示範,就能輕鬆產生出龐大的大型合成資料集。
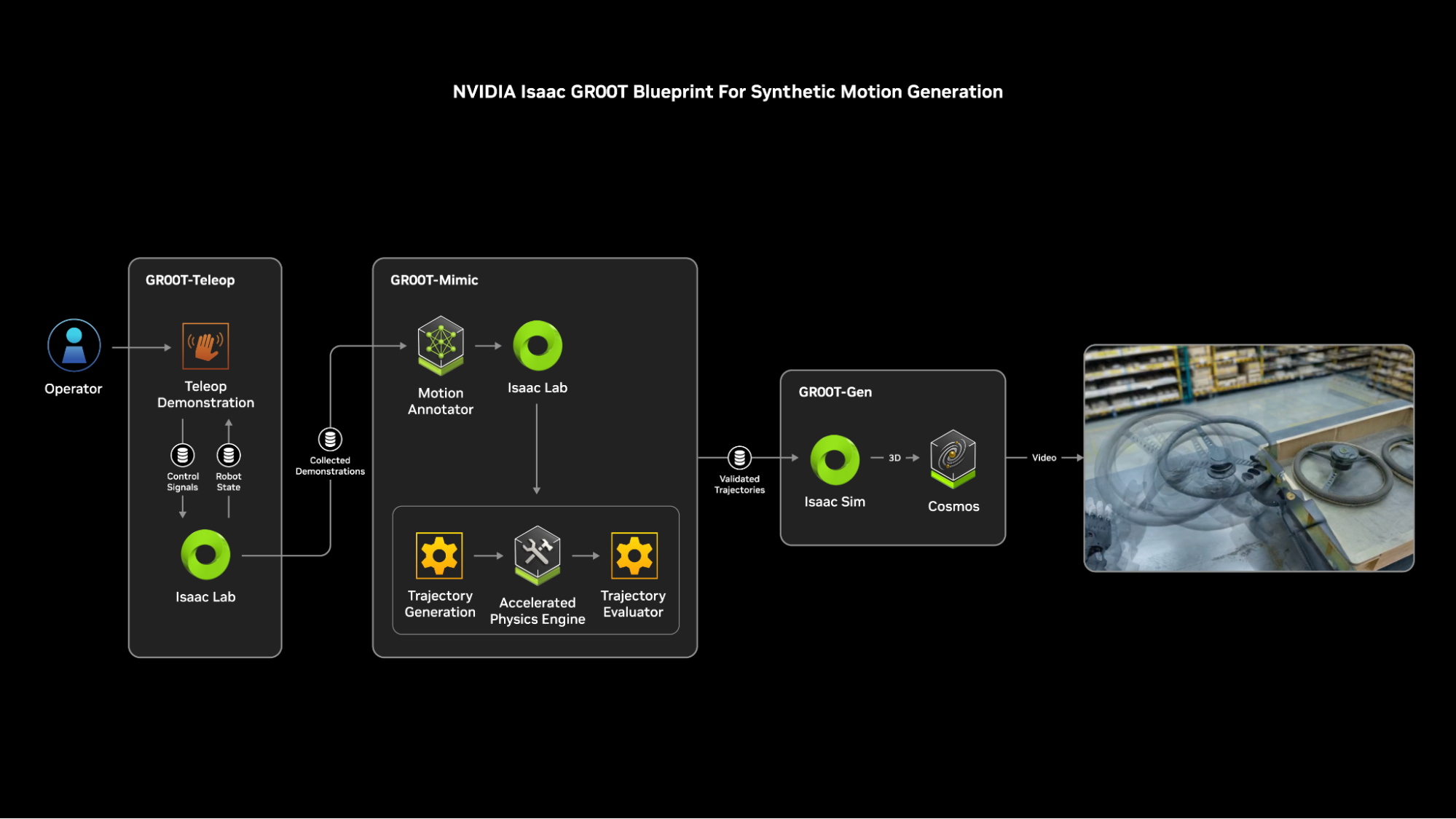
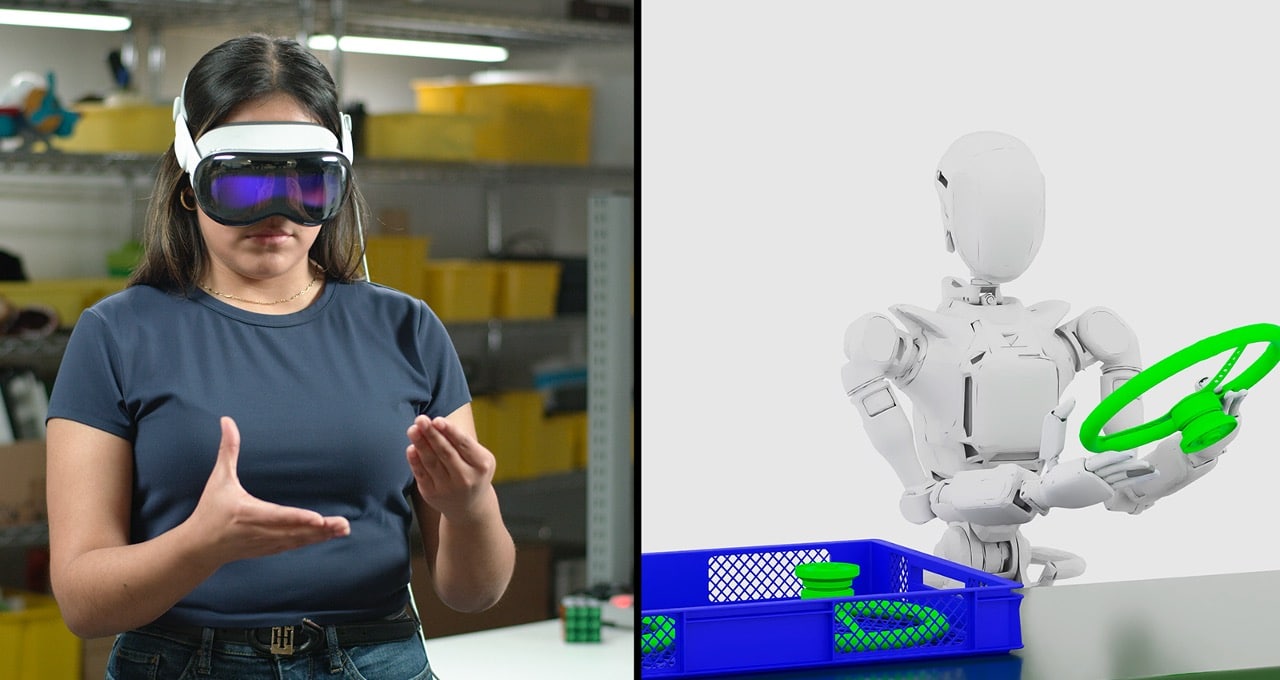
使用者從使用 GR00T-Teleop 工作流程開始,利用 Apple Vision Pro 在數位孿生模型裡捕捉真人的動作。模擬環境裡的機器人會模仿這些動作,並且記錄下來作為基本事實資料。
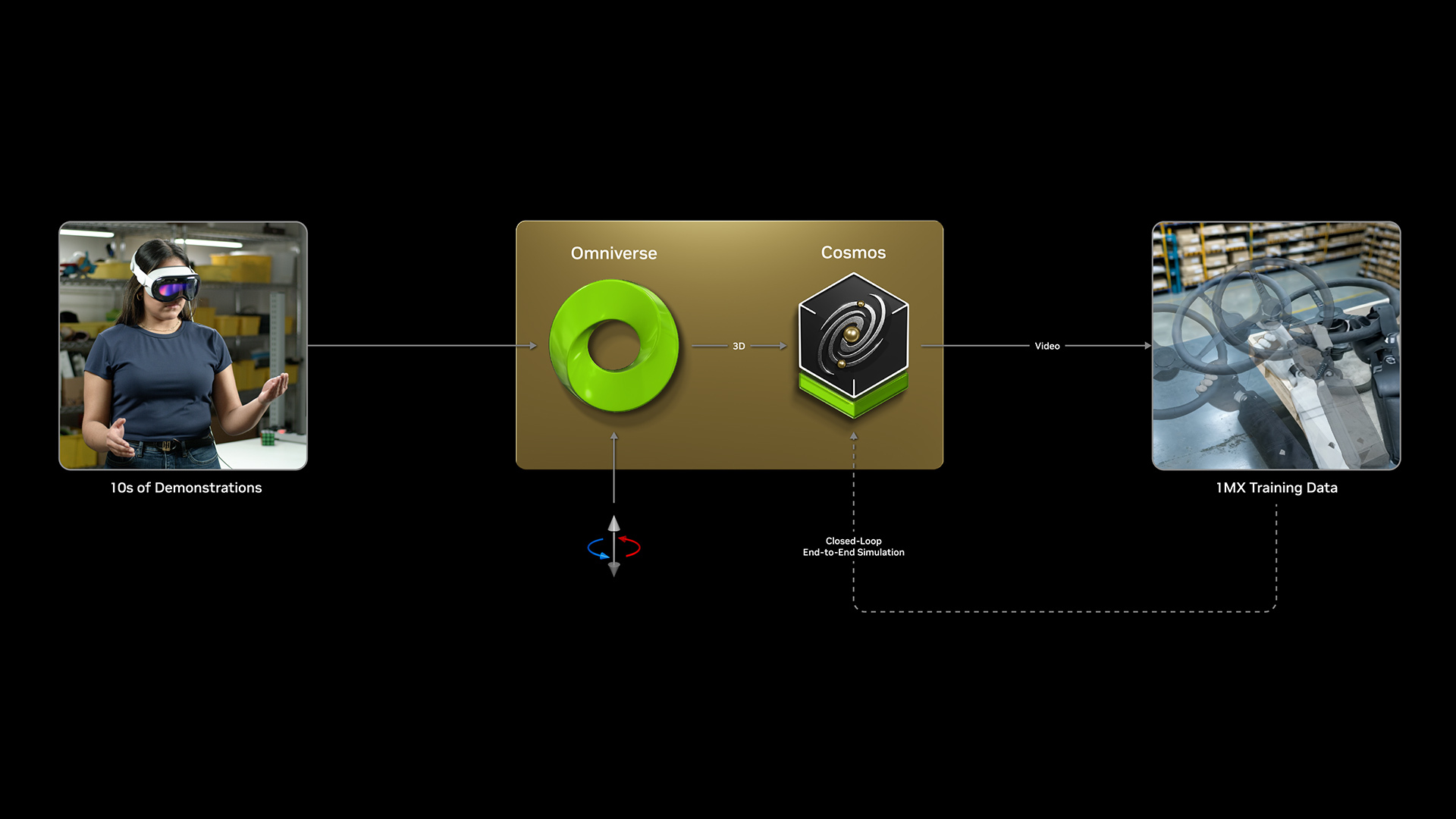
GR00T-Mimic 工作流程會將擷取到的真人示範內容乘以更大的合成動作資料集。最後,建構在 NVIDIA Omniverse 及 NVIDIA Cosmos 平台上的 GR00T-Gen 工作流程,會透過域隨機化與 3D 畫質提升技術,以倍數成長的方式擴充這個資料集。
隨後可以將這個資料集當成機器人策略的輸入項目,在 NVIDIA Isaac Lab 這個開源模組化的機器人學習框架中教導機器人如何有效安全地移動,且與周遭環境進行互動。
世界基礎模型縮小模擬與真實的差距
NVIDIA 也在 CES 上宣布推出 Cosmos,在這個平台上提供一系列預先訓練好的開放式世界基礎模型,專門用於產生物理感知影片內容與世界狀態,以協助開發實體 AI。它包括各種大小和輸入資料格式的自回歸和擴散模型。使用 18 千兆個詞元來訓練這些模型,這些詞元包括 200 萬小時的自動駕駛、機器人、無人機影片和合成資料。
Cosmos 平台除了有助於產生大型資料集,還能使用圖像畫質提升技術,將 3D 圖像變得更真實,以縮小模擬與真實之間的差距。把 Omniverse(用於開發 3D 應用程式和服務的應用程式介面和微服務開發平台)搭配 Cosmos 使用非常重要,因為 Cosmos 提供一個具有高度可控性、精準基於物理的模擬環境,能夠有效確保將世界模型常見可能造成幻覺的情況降至最低。
不斷成長茁壯的生態系
NVIDIA Isaac GR00T、Omniverse 及 Cosmos 這三個平台加起來協助實體 AI 及人型機器人的創新發展向前邁進一大步。各大機器人開發業者已經開始採用 Isaac GR00T 與展示其成果,包括 Boston Dynamics 和 Figure。
人型機器人軟體、硬體與機器人製造商可以申請搶先體驗 NVIDIA 的人型機器人開發者計畫。
歡迎觀看 NVIDIA 創辦人暨執行長黃仁勳精彩的 CES 大會開幕主題演講,並且訂閱電子報,也別忘了在 LinkedIn、Instagram、X 及 Facebook 追蹤 NVIDIA Robotics,隨時掌握最新資訊。
請見有關軟體產品資訊的通知。