生成式人工智慧(AI)和基礎模型讓自主機器能夠超越它們所接受訓練的操作設計領域。開發人員和研究人員使用標記化(tokenization)及大型語言和擴散模型等嶄新 AI 技術,現在可以解決一直以來在自主領域方面的各項障礙。
需要使用大量相異的資料來訓練、微調與驗證這些大型模型。不過收集這些資料(包括從罕見的邊緣情況和潛在危險情境中收集資料,例如行人在夜間橫越自動駕駛車前方,或是人類進入焊接機器人工作單元)可能非常困難,又得耗費不少資源。
為了協助開發人員填補這個缺口,NVIDIA Omniverse Cloud Sensor RTX API 提供了物理精確的感測器模擬,用於大規模生成資料集。這些應用程式介面(API)用於支援常用於自主機器上的感測器,包括攝影機、雷達與光達,且能完美與現有的工作流程進行整合,以加快開發各種自動駕駛車輛與機器人。
現已開放部分開發人員搶先體驗 Omniverse Sensor RTX API。埃森哲(Accenture)、Foretellix、MITRE 和 Mcity等企業正透過特定領域藍圖整合這些 API,為終端客戶提供部署下一代工業製造機器人和自動駕駛車所需的工具。
使用 Omniverse Blueprints為工業 AI 提供動力
在工廠和倉庫等複雜環境中,機器人必須被精心協調,才能安全高效率地與機器和人類工作者並肩作業。在設計、測試或驗證操作,又要避免中斷作業時,所有這些移動部件都會帶來巨大的挑戰。
Mega 是一個 Omniverse Blueprint ,可為企業提供 NVIDIA 加速運算、AI、NVIDIA Isaac 及 NVIDIA Omniverse 技術的參考架構。企業可以用它開發數位孿生模型,測試由 AI 驅動的機器人大腦,而這些大腦驅動著機器人、攝影機、設備等項目,以處理極為複雜又大量的作業。
這個整合了 Omniverse Sensor RTX 的藍圖可以讓機器人開發人員同時渲染工廠內任何類型智慧機器的感測器資料,實現高保真、大規模的感測器模擬。
隨著能夠在模擬環境裡測試操作和工作流程,製造商可以省下大量時間和投資,以全新方式提高作業效率。
國際供應鏈解決方案公司凱傲集團(KION Group)與埃森哲利用來自智慧攝影機、堆高機、機器人設備和數位人類的資料,使用 Mega 藍圖建立 Omniverse 數位孿生,作為工業AI機器人大腦的虛擬訓練和測試環境。
機器人大腦透過 Omniverse Sensor RTX API 渲染的物理精確感測器資料來感知模擬環境。機器人使用這些資料來計劃和採取行動,並透過 Mega 精準追蹤每一個動作,以及數位孿生中所有資產的狀態和位置。借助這些功能,開發人員可以在真正部署至實體環境裡之前,不斷建立和測試新配置。
推動開發與驗證自動駕駛車
自動駕駛車輛已開發超過十多年,但在取得正確的訓練與驗證資料方面所遇到的阻礙,還有緩慢的迭代週期,都阻礙了大規模部署。
為了滿足對感測器資料的這種需求,各家公司利用 NVIDIA Omniverse Blueprint for AV simulation,這是一個實現物理精確感測器模擬的參考工作流程。這個工作流程使用 Omniverse Sensor RTX API 來渲染出開發與驗證自動駕駛汽車所需的攝影機、雷達與光達資料。
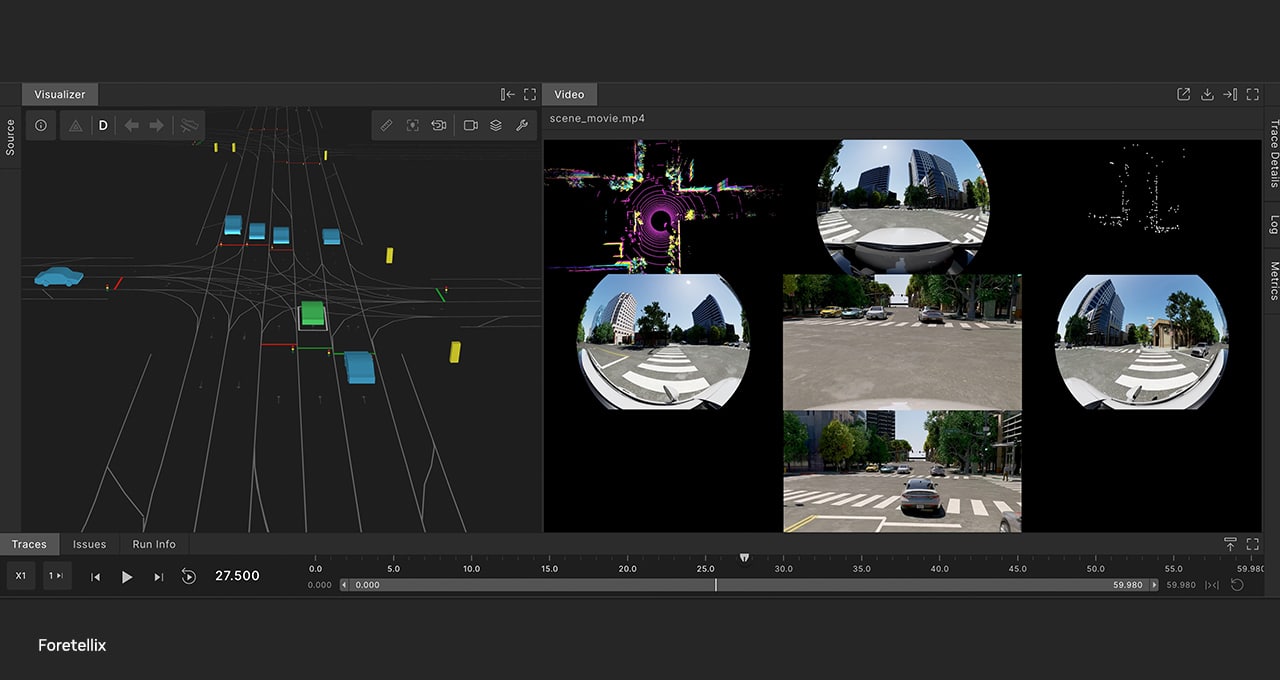
自動駕駛汽車工具鏈供應商 Foretellix 已經把這個藍圖納入該公司的 Foretify 自動駕駛車開發工作鏈,將物件級模擬轉換為物理精準感測器模擬。
Foretify 工具鏈可以同時產生任意數量的測試情境。Foretify 在這些情境中加入感測器模擬功能,開發人員便能評估自己在開發自動駕駛車方面的完整性,並以實現大規模安全部署所需的保真度和規模水平進行訓練和測試。。Foretellix 還將使用最新發表的 NVIDIA Cosmos 平台,產生更多樣化的情境進行確認與驗證。
自動駕駛技術提供商 Nuro 是美國規模最大的 level 4 部署業者之一,使用 Foretify 工具鏈在部署前對其自動駕駛車輛進行訓練、測試和驗證。
再者,研究機構 MITRE 與密西根大學的 Mcity 測試設施合作,建立供主管機關使用的數位自動駕駛車驗證框架,包括 Mcity 32 英畝自動駕駛車試驗場的數位孿生模型。這項合作案使用 自動駕駛車 模擬藍圖,在虛擬環境中大規模渲染出物理精確的感測器資料,以提升訓練成效。
得益於高保真感測器模擬技術,機器人與自動化的未來正逐漸成為人們關注的焦點。如需更深入瞭解 CES 大會上這些解決方案的資訊,請造訪埃森哲位於拉斯維加斯威尼斯人F展廳的攤位,以及 Foretellix 位於拉斯維加斯展覽中心西館 4016 號的展位。
欲了解最新的汽車與生成式 AI 技術,參加 NVIDIA 在 CES 大會的各項活動。
請見有關軟體產品資訊的通知。