地圖繪製車隊將在 2024 年時於全球範圍內勘測 50 萬公里,建立精度達公分等級的地球尺度數位孿生模型。
更深入掌握這個地球及世間一切事物的樣貌,地圖為人工智慧提供了先見之明,用以做出先進且安全的駕駛決定。
NVIDIA 創辦人暨執行長黃仁勳在其 GTC 大會主題演講中,宣布將推出 NVIDIA DRIVE Map 多模態地圖平台,可以在提高安全性之際,協助達到最高程度的自動駕駛。它將 DeepMap 勘測地圖的準確性,與不斷更新的人工智慧眾包地圖及龐大規模相結合。
DRIVE Map 的攝影機、光達及雷達這個三個定位層,提供了最先進的人工智慧駕駛系統所需的備援能力和多功能性。
到 2024 年,DRIVE Map 地圖將在北美、歐洲和亞洲地區的 50 萬公里道路上,進行實地勘測來繪製地圖。而路上飛馳的數百萬輛客車,也將不斷更新及擴大地圖所涵蓋的範圍。
NVIDIA DRIVE Map 將提供給整個自動駕駛車產業使用。
多層次技術
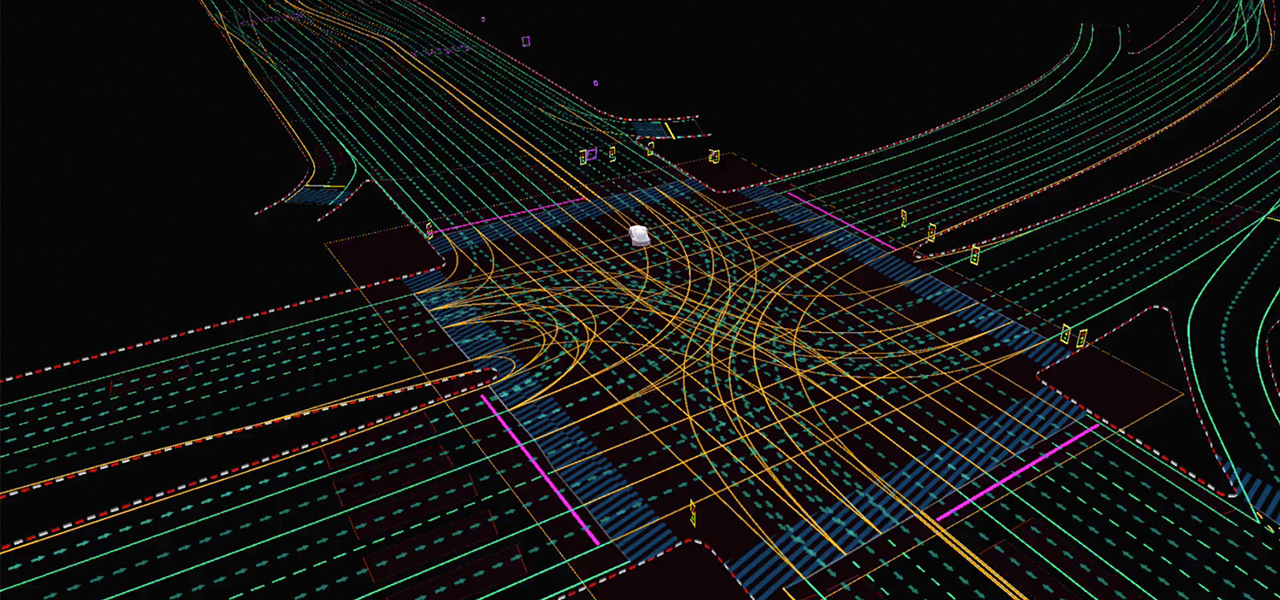
DRIVE Map 使用來自攝影機、雷達及光達等模態裝置所產生出的多個定位層資料。人工智慧駕駛系統可以一一對地圖的每一層進行定位,提供最高程度自動駕駛所需的多樣性和備援能力。
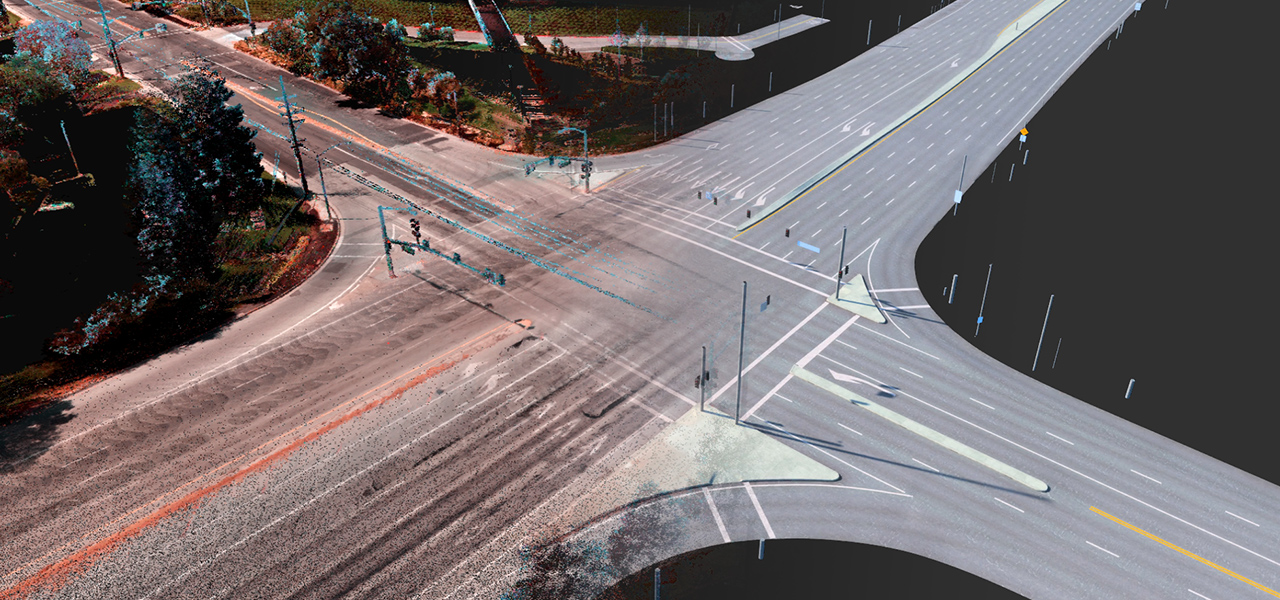
攝影機定位層由地圖屬性組成,像是車道分隔線、路面標示、道路邊界、交通號誌、標誌和電線杆。
雷達定位層是雷達回波的聚合點雲。它在光線不足的情況下特別有用,因為光線不足時攝影機難以拍攝,而天氣不好也會造成攝影機和光達效果不佳。
在沒有典型地圖屬性的郊區,雷達定位也能派的上用場,讓人工智慧駕駛系統能夠根據產生雷達回波的四周物體進行定位。
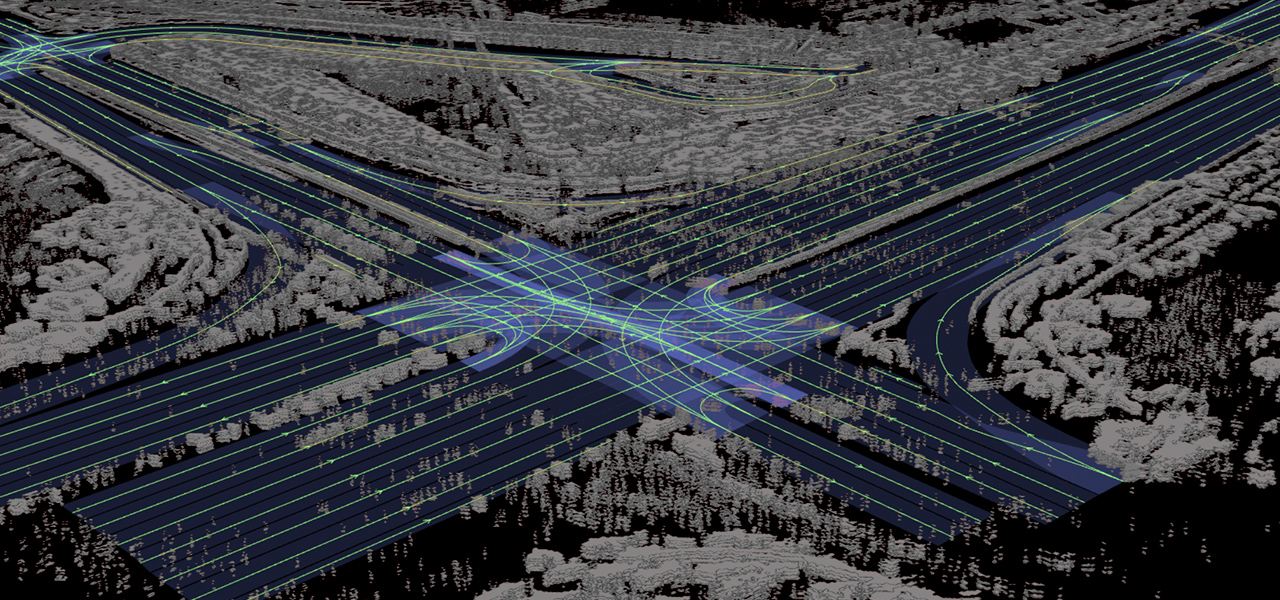
光達體素層能以最精確可靠的方式來呈現環境。它以 5 公分的解析度來建立立體的世界 – 這是攝影機及雷達無法達到的精度。
集雙方優點於一身
DRIVE Map 使用實地勘測引擎及眾包地圖引擎這兩個地圖引擎,蒐集與維護車隊共同取得的地球尺度記憶資料。
這種獨特的方法集雙方優點於一身,專用的勘測車輛創造出公分等級的精度,路上飛馳的數百萬輛客車又不斷更新和擴大地圖規模。
實地勘測引擎建立在 DeepMap 勘測繪圖引擎之上,這是一項在過去六年中開發並通過驗證的成熟技術。
人工智慧眾包引擎則會從數百萬輛汽車中收集最新地圖,這些車輛會在行駛過程中不斷將最新資料上傳到雲端。接著匯總這些資料、載入 NVIDIA Omniverse,再更新地圖,在幾個小時內便能以無線更新的方式,提供最新地圖給實體環境裡的車輛。
DRIVE Map 還提供了 DRIVE MapStream 這個資料介面,任何符合 DRIVE Map 要求的客車便能利用攝影機、雷達和光達資料持續更新地圖。
地球尺度的數位孿生模型
DRIVE Map 不只協助人工智慧做出最佳的駕駛決策,還能加快投放自動駕駛車,這樣便能產生出實地勘測資料來訓練深度神經網路,還有用於測試和驗證。
這些工作流程以 Omniverse 為中心,將實體環境的地圖資料都載入和存放在這裡。Omniverse 維護著一個地球尺度的數位孿生模型,地圖勘測車輛與數百萬輛客車會不斷更新和擴大這個模型的內容。
利用建立在 Omniverse 上的自動內容生成工具,將精細的地圖轉換成可在當中行車的模擬環境,能夠搭配 NVIDIA DRIVE Sim 一同使用。諸如道路標高、路面標示、分隔島、交通號誌、標誌和電線杆等特徵,都以公分級的精度準確複製。
符合物理原理的感測器模擬內容及域隨機化這兩項技術,讓自動駕駛車開發商能夠使用模擬環境來生成真實資料中沒有的訓練場景。
自動駕駛車開發商還能在現實環境裡投放自動駕駛車之前,把場景生成工具用在數位孿生環境裡測試自動駕駛車軟體。最後,車隊營運商可以透過數位孿生模型,以虛擬方式縱觀全局,掌握車輛的行駛位置,在需要時以遠端操作的方式提供協助。
高度通用且具擴充能力的 DRIVE Map 平台,使得人工智慧駕駛系統員能夠更深入瞭解這個世界,以不斷提升自動駕駛能力。