NVIDIA DRIVE Mapping 正在走向全球。
在 GTC 開幕演講中,NVIDIA 創辦人暨執行長黃仁勳先生展示結合了 NVIDIA DRIVE 和 DeepMap 技術的最新功能。結果顯示該高精度解決方案能夠實現眾包圖資並穩定地運用於自動駕駛汽車地圖和定位。
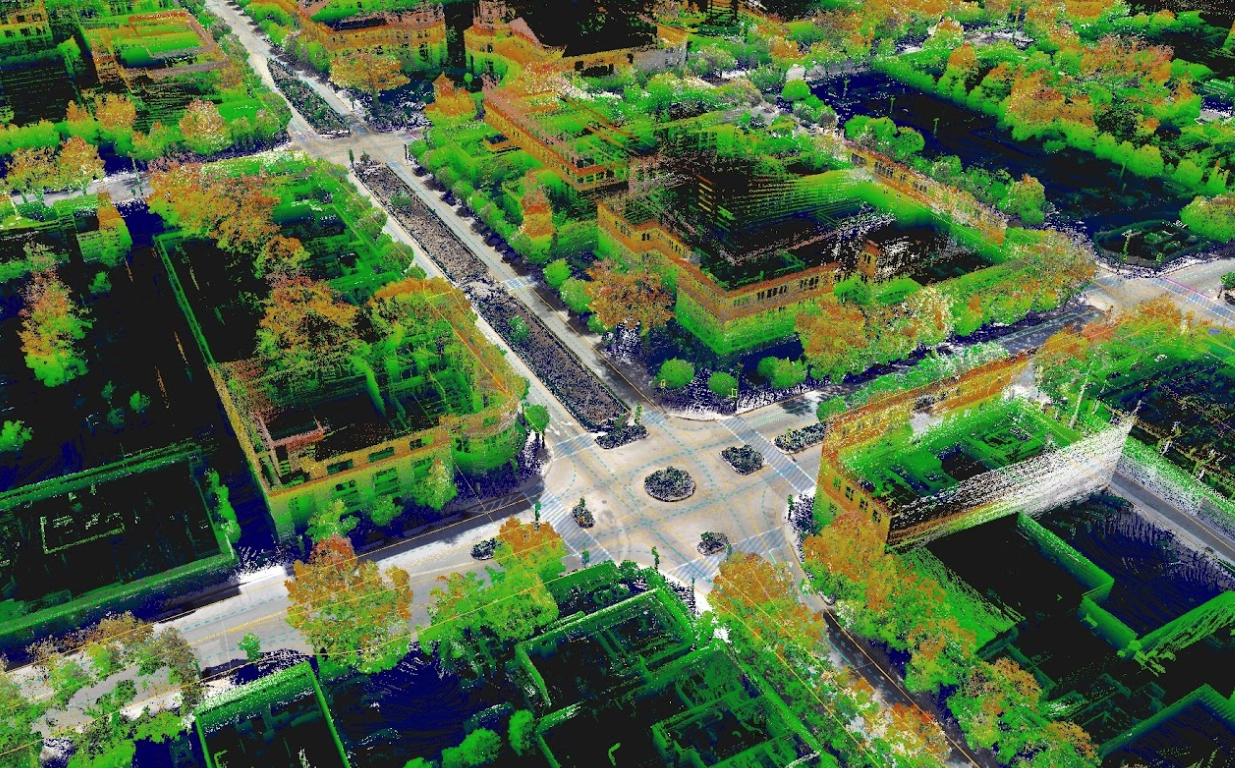
地圖是自動駕駛的基礎支柱,是自動駕駛的集體記憶。 高清地圖提供了對駕駛環境的基礎理解,並在汽車駕駛過程中不斷更新。NVIDIA 近期收購了世界領先的自動駕駛圖資公司 DeepMap,團隊正在共同加速、改進和擴展全球的高性能地圖解决方案。
這些地圖必須以更快的處理速度和更少的資料存儲實現厘米級精度,反映道路施工區域或車道封閉等即時路況,並且高效擴展至整個自動駕駛車隊。地圖還必須能夠在世界各地運行。
NVIDIA DRIVE Mapping 使自動駕駛車隊和單車均能實現即時建圖和地圖更新,為全球自動駕駛創造可擴展的解決方案。
持續的循環
DRIVE Mapping 專為安全、可擴展和時效性而建立。
該系統能夠利用運行 NVIDIA DRIVE Hyperion 8 的車輛的感知結果,其中包括量產自動駕駛汽車所需的計算、感測器和軟體。而且,它涵蓋了車輛的整個行駛過程,以支持大規模的門到門自動駕駛。
DRIVE Mapping 為 AI 輔助駕駛功能而製圖的每個區域都包括攝影機和雷達層。在天氣和攝影機可能被遮擋的道路條件下,雷達能夠為定位和駕駛提供一層冗餘。在這種情涗下,為提高可靠性和準確性,地圖網路使用了經過精確資料輸入的地圖來訓練。
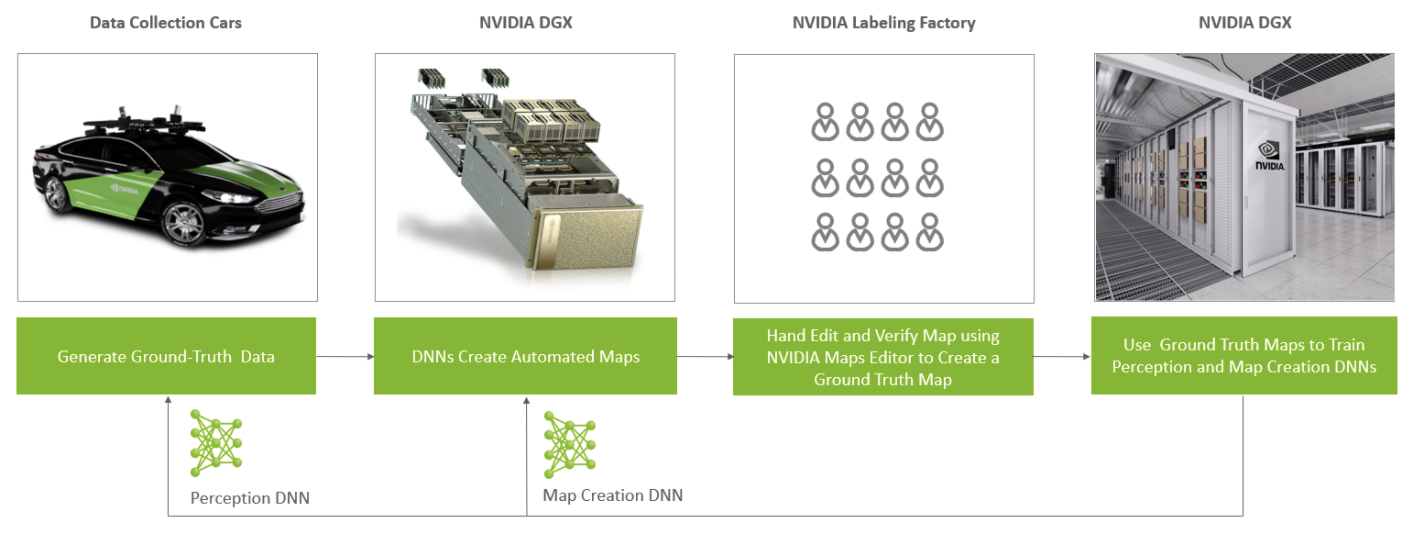
DRIVE Hyperion 感測器資料輸送到車輛內的 NVIDIA DRIVE AGX AI 運算平台中。地圖網路使用這些資料進行感知並識別交叉路口詳細資訊、交通號誌、停車位以及道路和道路邊界,然後確定安全的可行駛路徑。這些網路能夠在不同的環境、光照條件、天氣和地理範圍內運行。
作為一個眾包平台,DRIVE Mapping 的覆蓋範圍隨著使用 NVIDIA DRIVE Hyperion 的汽車製造商的增長而擴大。2024 年開始,這些汽車製造商的車輛有望分佈在全球各地,並將繼續發展壯大。DRIVE Mapping 利用 NVIDIA DGX SuperPOD 架構在全球範圍內維護這些地圖。這些 AI 系統從 DRIVE Hyperion 車輛中提取 TB 級感知資料來創建和更新地圖。
將驅動 Hyperion 車輛在路上的廣泛基礎與強大的能力相結合,車輛能夠檢測道路變化並保持地圖時效性。
使用 DeepMap 進行開發
透過運用 NVIDIA 收購的 Deep Map 長期以來在地圖領域累積的專業知識,DRIVE Mapping 可以在全球範圍進行擴展,為更多的道路帶來更安全、更高效率的自動駕駛交通運輸。
藉著這些豐富的經驗,NVIDIA 正在開發一個專門的車用團隊來建立全球人口密集的未來區域地圖。這些地圖將為未來世代自動駕駛實現即時地圖而提前做好準備。
使用 DRIVE Mapping,自動駕駛汽車世界不僅可以理解 3D,還可以建構它以實現持續發展和改進。