
隨著移動機器人的出貨量激增,以滿足想要提高營運效率之各行各業日益增長的需求,NVIDIA 將推出全新平台以協助打造下一代自主移動機器人(Autonomous Mobile Robot,AMR)。
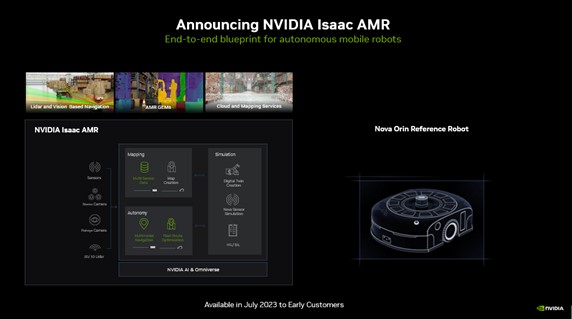
NVIDIA 創辦人暨執行長黃仁勳在台北國際電腦展 COMPUTEX 的主題演講中宣布,Isaac AMR 將為移動機器人帶來先進的測繪、自主移動及模擬功能,且即將開放早期客戶搶先體驗。
Isaac AMR 平台用於模擬、驗證、部署、最佳化與管理自主移動機器人。當中包括邊緣到雲端的軟體服務、運算,還有一套參考感測器和機器人硬體,以加速開發與部署AMR,降低成本和縮短上市時間。
ABI Research 數據指出,移動機器人的出貨量將從 2023 年的 25.1 萬具,預估增加至 2028 年的 160 萬具,同期收入預計將從 126 億美元上升至 645 億美元。
簡化自主移動之路
儘管各行各業採用機器人的數量爆炸性成長,內部物流產業依舊面臨著挑戰。
過去通常要為每具機器人從頭開始編寫自主導航軟體應用程式,這使得讓不同機器人之間擁有自主移動能力一事變得更加複雜。再加上龐大的倉庫、工廠和倉配中心通常佔地一百萬平方英呎以上,不容易為機器人繪製地圖與時時更新。把 AMR 與現有工作流程、機器人管理和倉管系統進行整合,是一件棘手的事。
若想將開發先進機器人,且想把傳統堆高機或自動導引搬運車改為全自主移動機器人,Isaac AMR 提供了加快改為使用全自主移動機器人的藍圖,不只降低了成本,還加快部署最先進的 AMR。
以 Orin 為基礎的參考架構
Isaac AMR 建立在 NVIDIA Nova Orin 參考架構的基礎上。
Nova Orin 是 Isaac AMR 的大腦和眼睛。它整合了多個感測器,包括立體攝影機、魚眼攝影機、2D 及 3D 光達,還有強大的 NVIDIA Jetson AGX Orin 系統模組。參考機器人硬體則是預先整合了 Nova Orin,開發者便能輕鬆在自己的環境中評估 Isaac AMR。
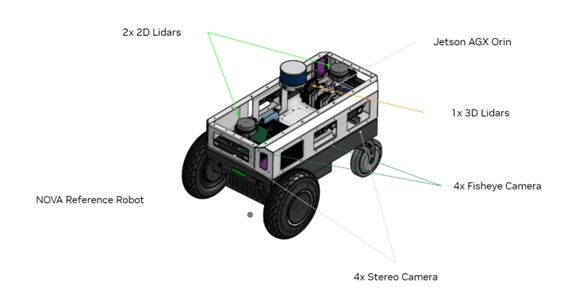
Orin 是 Nova 的運算引擎,讓 Nova 可以取得部分最先進的人工智慧和硬體加速演算法,即時在邊緣以每秒進行 275 兆次(TOPS)運算的算力執行這些演算法。
經同步與校準後的感測器套件,以多種感測器及備援能力即時進行 3D 感知和繪測作業。用於記錄、上傳和重播的雲端原生工具,簡化了除錯、建立地圖、訓練和分析的工作。
Isaac AMR:繪製地圖、自主移動及模擬
Isaac AMR 提供繪製地圖、自主移動及模擬的基礎。
Isaac AMR 加上 DeepMap 的雲端服務,加快大型環境的地圖繪製及語義理解,將機器人繪製大型設施地圖的時間,從原本的數週縮短到數日,且無需純熟的技術團隊精準度即可達到公分等級。它可以生成豐富的 3D 體素圖,可用於為多種 AMR 建立佔據圖和語義圖。

Isaac AMR 還縮短了在大型、高動態和非結構化環境中開發及部署機器人的時間,使用 NVIDIA cuOpt 軟體的多模式導航與雲端機器人隊伍最佳化技術來提供自主移動的能力。
一個加速和模組化的框架提供攝影機與光達的即時感知能力。利用先進的路徑規畫器、行為規畫器與語義資訊來規畫及控制,帶領機器人在複雜環境中自主運行。透過低程式碼、無程式碼的介面,簡化了快速開發與自訂不同場景及使用案例應用程式的作業。

最後,Isaac AMR 利用由 Isaac Sim 提供在 NVIDIA Omniverse 平台上製作出精準符合物理原則的模擬內容,讓操作機器人變得更簡單,而 NVIDIA Omniverse 是一個用於工業數位化的開放式開發平台。如此一來便能製作出數位孿生模型,在部署到實體環境前,先為每個客戶開發、測試和量身打造機器人應用程式。這樣顯著降低了部署 AMR 的營運成本與複雜性。

註冊以搶先試用 Isaac AMR。