來 GTC Digital 主題會議,探索 NVIDIA DRIVE 的開發過程。
智慧車輛需要智慧化發展。
因此, NVIDIA 建立了完整的 AI 技術產品組合 – 從資料中心到車載電腦 – 支持軟體定義的自動駕駛汽車。 在本月的 GTC Digital 期間,我們將深入了解該開發流程的工作方式,以及我們如何實現更安全,更高效的運輸。
要實現真正的無人駕駛,自動駕駛汽車必須能夠在全世界上千千萬萬種條件下行駛。要實現這一目的,需要海量資料。
假設一個 50 輛車的車隊每天跑六個小時,那將會產生約 1.6 PB 的感測器資料。如果將所有資料都儲存在標準的 1GB 随身碟上,它們將覆蓋 100 個多個足球場。這些資料必須被整理和標記,才能完全訓練將在汽車中運行的深度神經網路( DNN ),以便執行各種專用功能,如目標檢測和定位。
訓練和測試自駕軟體的基礎結構必須包括高效能超級電腦,以處理這些海量資料需求。為了實現高效運行,系統必須能夠智慧地整理和組織這些資料。最後,該系統還需具備可追踪性 – 使其在運行過程中發現和修復錯誤,和可重複性 – 使其能一遍又一遍地檢查同一場景以確保 DNN 的準確度。
作為 GTC Digital 系列的一部分, NVIDIA 將介紹完整的開發流程和訓練基礎架構,以及一些相應的 DNN ,以推動未來汽車部署的進展。
孕育於資料中心
今天的汽車由工廠車間的裝配線組裝需成,而自動駕駛汽車則誕生在資料中心。在 GTC Digital 主題會議 上, NVIDIA AI 基礎設施副總裁 Clemént Farabet 將詳述高效、端到端的自動駕駛汽車平台。
NVIDIA 內部 AI 基礎架構包括 NVIDIA DGX 伺服器,用於儲存和處理 PB 級的駕駛資料。為了進行全面的訓練,開發人員必須使用 50 億到 100 億畫面臨進行開發,然後評估 DNN 的效能。

高效能資料中心 GPU 大幅加快處理資料的速度。 Farabet 的團隊使用 主動學習 等高級學習方法來優化開發流程。
主動學習讓 DNN 能夠選擇需要學習的資料,而不是僅僅依靠人為管理和標記駕駛資料進行訓練。專用的神經網路經過畫面池進行處理,並標記那些顯示不確定性的畫面。被標記的畫面隨後被手動標記並進行訓練 DNN ,以確保其從新的或令人迷惑的準確資料中學習。

DNN 在經過訓練後,即可在 NVIDIA DRIVE Con stellation 模擬平台上進行測試和驗證。此雲端解決方案在虛擬環境中的各種場景,從例行駕駛到罕見甚至危險的情況下,能夠行駛數百萬英里,其效率,成本效益和安全性要比現實世界中更高。
DRIVE Con stellation 的高真實度模擬可確保自動駕駛汽車在公共道路上行駛之前,這些 DNN 在各種可能的場景和條件下被反覆測試。
與資料中心訓練相結合,模擬使開發人員可以在自動化,可追踪和可重複的開發過程中不斷改進他們所開發的軟體。
了解更多詳情,請註冊 GTC Digital ,並關注“ NVIDIA 自動駕駛汽車的 AI 基礎架構 ”主題會議。
邊緣的 DNN
經過訓練和驗證後,這些 DNN 便可以在汽車中運行。
在 GTC Digital 期間, NVIDIA 自動駕駛汽車資深經理,自動駕駛實驗室 DRIVE Labs 系列影片 主持人 Neda Cvijetic詳細介紹 了 NVIDIA 開發的自動駕駛 DNN 範例。(s22159)

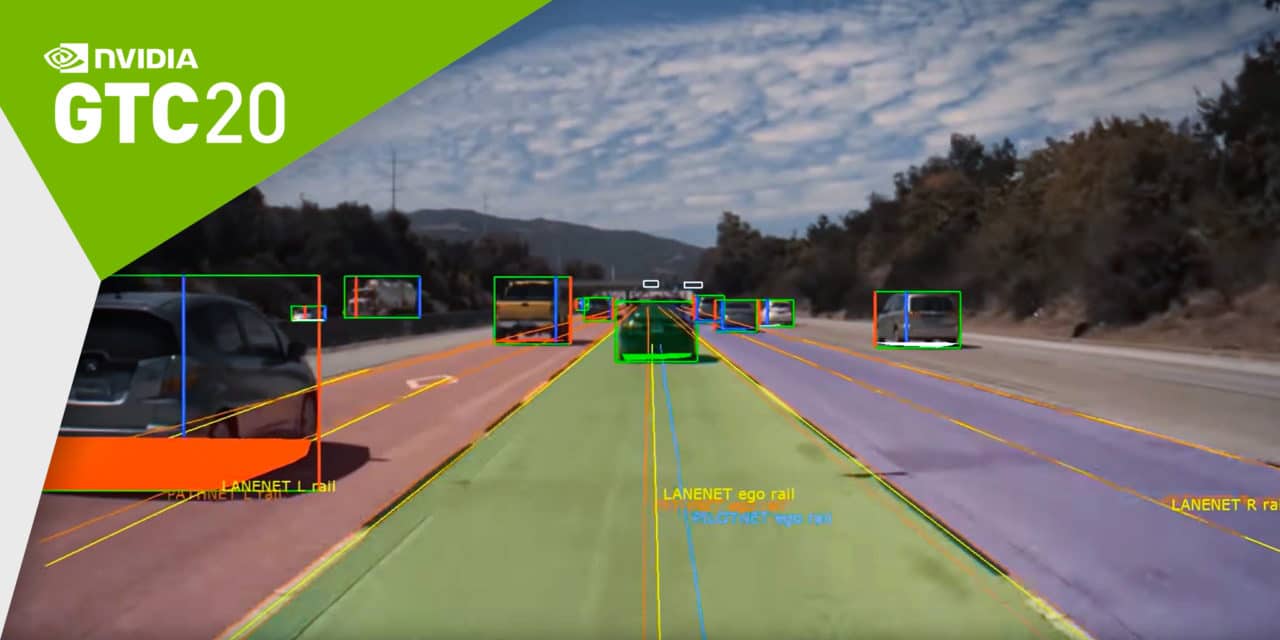
自主車輛運行一系列 DNN ,涵蓋感知,圖資和本地化,以確保安全運行。對人類而言,這些任務很簡單,但實際上它們都是很複雜的過程,需要智慧化的方法才能成功執行。
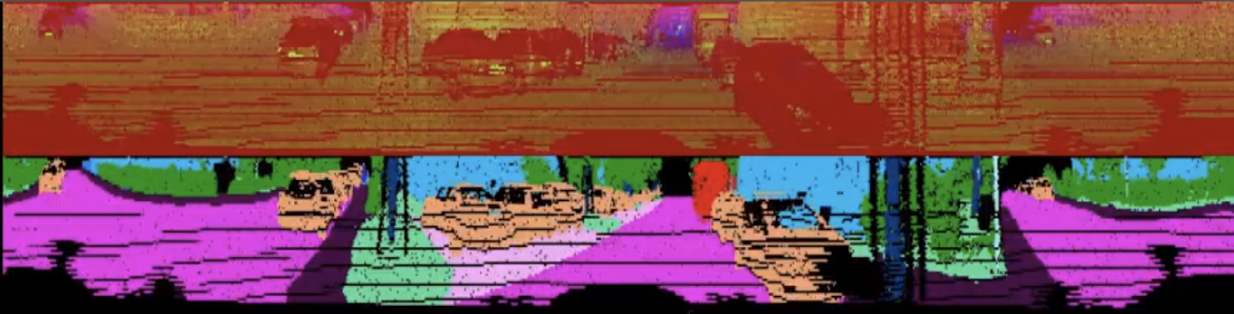
例如,為了分辨道路上的物件,行人和可駕駛空間, DNN 使用了被稱為 全景分割 的過程,該過程能夠以像素級精度識別場景。
為了幫助車輛在各種環境中感知停車位,開發人員利用 ParkNet DNN 將停車位識別為四面多邊形而不是矩形,因而讓它可以識別傾斜的停車位空間和入口。
LidarNet DNN 透過融合多個視角來獲得準確和完整的感知訊息,解決了處理光達資料定位的難題。
通過將這些和其他 DNN 相結合,並在 NVIDIA DRIVE AGX 平台等高級車內運算平台上運行,自動駕駛汽車可以在沒有人類駕駛員的情況下進行全面的感知,規劃和控制。
- 了解更多詳情,請註冊 GTC Digital ,並關注“ NVIDIA 自動駕駛實驗室:深入了解自動駕駛汽車軟體 ”。 (s22159)
註冊 GTC Digital,了解 NVIDIA 專家和 DRIVE 生態系統所帶來的全新內容。到 4 月 23 日,每週四都會有更多主題內容更新,精彩不容錯過!