編者手札:這是我們 NVIDIA DRIVE Labs 系列中 的最新文章,它以工程技術為重點研究了各個自動駕駛汽車的挑戰以及 NVIDIA DRIVE 如何解決這些挑戰。您可點閱 查看我們所有其他汽車相關文章。
本地化是自動駕駛汽車的一項關鍵功能,它可以在地圖上實現精確的厘米級定位。
如此高的精確度使自動駕駛汽車能夠了解周圍環境並建立道路和車道結構感。借助本地化功能,車輛即使在道路標記不清楚的情況下,也可以檢測到何時車道分叉或合併,規劃車道變更並確定車道路徑。
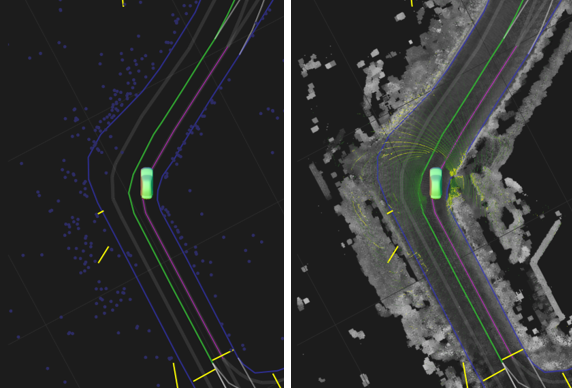
DRIVE Localization 通過將車輛環境中的語義地標與高清地圖中的特徵進行匹配,從而確定精確的實時位置,從而實現精確定位。在這個 DRIVE Labs 中,我們展示了我們的定位演算法如何使用市場上的感測器實現高精度和穩健的 DRIVE Localization 解決方案。
精確定位導航
本地化功能可在高清( HD )地圖內提供無人駕駛汽車的 3D 位置,包括 3D 境況, 3D 方向及其不確定性。一般 GPS 導航地圖僅需要幾米尺範圍的精度,相對於 GPS 地圖,無人駕駛汽車的定位精度要求更高,通常約為厘米以內和幾分之一度。
有鑑於實時感知的快速發展,本地化對高清地圖的價值可能不會立即顯現。但是,當高清地圖被定位時,汽車才可以根據超出其當前視野的訊息來做出決策。
例如,地圖可以向汽車發出信號,告知當前車道將沿道路某些方向終止。然後,汽車可以在有空間的任何位置退出車道,並合併到相鄰車道中。這避免了潛在危險的最後一秒合併。
本地化 HD 地圖還可以使自動駕駛汽車在地圖中考慮其他附近車輛的行為。例如,在一個十字路口,它可以識別出迎面駛來的汽車在左轉彎車道上並且不會直行,從而可以安全地執行無保護的左轉彎。
大眾市場解決方案
自動駕駛汽車通常使用成本高的慣性感測器和 GNSS 感測器,再加上光達,以實現精確的定位。當使用這些昂貴,精確的感測器時,由於先前的準確性和光達數據提供的大量信息,在地圖上對汽車進行定位非常簡單。要實現大眾市場感測器(如攝影機和低成本導航, GNSS 和 CAN 感測器)的本地化,需要大量創新。
為了適應大眾市場感測器提供的少數甚至嘈雜的數據, DRIVE Localization 考慮了許多潛在的功能對應關係。評分候選位置是通過將環境的高清地圖與來自攝影機數據的檢測結果疊加在一起。然後,模組會平行評估數千個候選姿勢,為地圖中的特徵與一幀可視數據之間的匹配度評分。
如果特徵檢測嘈雜,則單個攝影機幀的最佳姿勢可能會模棱兩可。因此,該模組還依賴於姿勢的時間交叉檢查。在這些採樣和交叉檢查的姿勢之上,採用了過濾器。
該演算法的計算需求非常苛刻,但是該設計是完全針對 NVIDIA Xavier 片上系統和 GPU 並行處理量身定制的,而 NVIDIA DRIVE AGX 平台可以高效地進行處理。我們演算法的堅實性使其能夠在具有挑戰性的環境中工作,例如夜間,下雨天和大霧天,以及像隧道一樣的 GNSS 拒絕區域,即使只有一台攝影機也是如此。
DRIVE Localization 可以應對挑戰性環境。例如,當一台攝影機受日落影響時,如果可用, DRIVE Localization 可以使用另一台攝影機進行本地化( 1 ) 。其他具有挑戰性的案例包括在大霧天 ( 2 ) 和 GNSS 拒絕區域( 3 ) 中定位。
冗餘與多樣性
DRIVE Localization 可以獨立用於一台或多台攝影機,雷達或光達。每個感測器本身都提供可直接使用的準確輸出。此後,可以融合來自這些單獨輸出的本地化以提供單個甚至更可靠的輸出。
通過檢查不同定位輸出之間的一致性,使用多種感測器的能力提供了額外的安全性。例如,如果一個感測器的校準取消,或者感測器的功能受到雨天或雪天等惡劣天氣的嚴重影響,則這些感測器的定位結果將與其他感測器明顯不同。
DRIVE Localization 可以檢測到這種異常並根據一致的感覺生成融合結果。通過利用這種類型的冗餘,自動駕駛汽車可以實現更高的安全性。
我們還與世界各地的圖資公司 合作,為全球道路上的高清地圖本地化,從而在各種位置實現安全的自動駕駛。
NVIDIA DRIVE Software 10.0 版本中的開發人員可以使用 DRIVE Localization 。在此版本中,我們開放了基於相機的本地化 API ,以幫助在大眾市場消費車輛上啟用此功能。將來的版本中將提供雷達和光達感測器的本地化以及本地化融合。