編輯手札:這是 NVIDIA DRIVE Labs自動駕駛實驗室系列影片的一支,我們以工程技術為重點的角度研究自動駕駛汽車的各個挑戰以及 NVIDIA DRIVE 團隊解決這些問題。您可點此查看我們自動駕駛汽車其他文章。
AI 可以使汽車在黑暗中更容易看見路況,同時確保其他車輛中的駕駛員不會被燈光影響。
遠光燈可以大大增加大燈的夜間可視範圍,但同時它們也會產生眩光給其他駕駛員造成危險。大多數商業上可用的遠光燈系統仍然需要手動開關控制,這可能會給駕駛員造成混亂和麻煩,從而導致遠光燈沒有被充分利用或被誤用。
在本期的自動駕駛實驗室影片中,我們將介紹 AI 如何克服這些限制,使用感知來減少迎面而來車輛的大燈所造成的眩光。
我們利用攝影機圖像訓練了基於攝影機的深度神經網路(DNN)- AutoHighBeamNet,它可以為車輛的遠光燈系統自動生成控制輸出,從而提高夜間駕駛人的視野範圍和安全性。
AutoHighBeamNet 無需根據場景中其他光源的照度來產生遠光燈控制信號,而是可以從更廣泛的條件中學習,以實現真正自動的和可靠的遠光燈控制。
深度神經網路對攝影機圖像中感知到在動的車輛產生反應。任何移動中的車輛都會以打開前大燈或尾燈的汽車來定義。例如,路燈旁所有燈光都熄滅的車輛是 AutoHighBeamNet 忽略的不活動車輛。
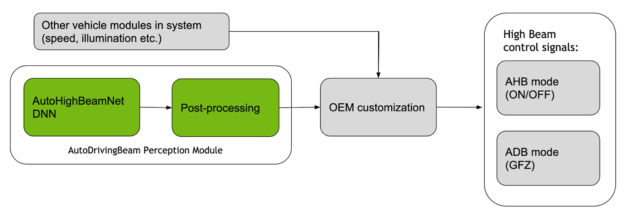
AutoHighBeamNet 是 AutoDrivingBeam 視覺感知模組的一部分,該模組從單眼前視攝影機獲取圖像數據(如圖 1 所示)。每幀 AutoHighBeamNet 檢測結果將會輸入到後處理子模組中,該子模組能夠執行每個畫面和時間的後處理。然後, AutoDrivingBeam 模組的輸出可以由汽車製造商進行客制化,根據來自其他車輛模組的輸入信號(例如,汽車本身的速度,環境照明條件等)調整適應其相應的規則和政策。根據這些客制化,最終產生遠光燈控制信號。
遠光燈控制信號可以採用兩種不同的模式:自動遠光燈(AHB)模式,它提供二進制開/關控制;自適應驅動光束(ADB)模式,可精確控制多個遠光 LED 陣列以創造無眩光區域(GFZ)。
AHB模式
在 AHB 模式下(如圖 2 所示),車輛的遠光燈將在夜間照明不佳的情況下自動打開。但是當檢測到移動中的車輛進入視野範圍時,遠光燈會自動關閉並切換為近光燈。車輛遠離後,遠光燈將自動重新打開。

ADB模式

自適應驅動光束( ADB )是遠光燈控制的新標準。 如圖 3 所示,在 ADB 模式下,車輛通過使遠光燈 LED 陣列前照燈中的各個 LED 變暗來防止眩光影響遠處行駛的車輛。 這種選擇性調光可根據交通模式的需要創造無眩光區域。 與 AHB 模式類似,在活動車輛離開場景後,變暗的區域將自動變回全亮度。 因此,在 ADB 模式下,始終可以保持遠光燈開啟,以提高夜間行駛的安全性,而不會引起其他道路使用者眩光。
ADB 模式已於 2016 年在歐洲被允許採用。儘管尚未獲得美國市場的批准,但 ADB 現正接受美國國家公路交通安全管理局( NHTSA )的積極評估。
無眩光區域
在 ADB 模式下,無眩光區域( GFZ )是一種數據結構,用以表示在攝影機可感知的畫面中應完全避免使用遠光燈或使用衰減遠光燈到可能發生反射的區域。
圖 4 說明了基於矩陣 LED 照明系統的無眩光區域輸出,其中每個 LED 可單獨控制。

無眩光區域輸出用於感知攝影機坐標。將無眩光區域映射到車輛照明系統需要一個校準的過程。校準工具及其流程與特定的車輛設置和與 ADB 相容的照明系統選擇緊密相關。
NVIDIA 遠光控制模組的 API 將在 NVIDIA DRIVE 軟體 10.0 版中提供對 AHB 模式的支持,同時也會公佈相關訊息,供開發者和汽車製造商根據自己的需求定義遠光燈控制策略。更多訊息,請參考NVIDIA DRIVE Networks。